フィジカルAIの“データ問題”を解く ― Tetraz「RoboScale」が拓くロボット学習データの収集・管理・学習プラットフォーム
基盤技術・サービス
- 関連分野・業種
- 製造、物流・倉庫、建設・インフラ、モビリティ、医療・ヘルスケア、介護・福祉、農業・一次産業、小売・店舗
公開日
- ヒアリング先
- Tetraz株式会社代表取締役 竹内 優介 氏
Tetraz株式会社は、フィジカルAIの開発に不可欠なロボット学習データの収集・管理・学習・評価を一気通貫で支援するプラットフォーム「RoboScale(ロボスケール)」を提供しています。データ収集の依頼から、オペレーターによる実機テレオペレーションでのデータ取得、収集データの一元管理、品質評価のためのVLAモデル学習、Python向けライブラリを通じた学習環境への配信までを、SaaSとローカルアプリの組み合わせでシームレスにつなぎます。これまでロボットやオペレーターの調達、データ品質管理に多大な労力を費やしていたフィジカルAI開発者にとって、開発スピードと品質を一気に引き上げる基盤ツールです。
1.Tetrazのビジョン ― フィジカルAIのデータ基盤を、世界に向けて構築する
Tetraz株式会社は、「フィジカルAIのためのデータインフラ」を構築することをミッションに掲げるスタートアップです。同社が手がけるサービス「RoboScale」は、一言で言えば「Scale AIのロボティクス版」というポジショニングです。米Scale AI社が自動運転やLLM向けのデータラベリングで急成長を遂げたように、Tetrazは急速に立ち上がりつつあるフィジカルAI領域において、データ収集・管理・配信の中核プレイヤーになることを目指しています。
VLA(Vision-Language-Action)モデルに代表されるフィジカルAIは、現在ロボティクス領域で最も注目される技術トレンドの一つです。家事を自律的にこなすヒューマノイドから、工場・倉庫・介護現場・ウェットラボなど特定業界に特化したロボットAIまで、ユースケースは急速に広がっています。
一方で、フィジカルAIの実現を阻む最大のボトルネックは「データ」です。大規模言語モデルがインターネット上のテキストをクローリングして大量の学習データを確保できたのに対し、ロボットの動作データは「実機を操作して収集する」必要があり、圧倒的に量が足りません。AIアルゴリズム開発に着手する前段階で、データ収集だけに膨大な労力・時間・コストがかかっているのが現状です。
Tetrazはこの構造的な「データ問題」を真正面から捉え、ロボット学習データの収集と活用を効率化するプラットフォームを通じて、フィジカルAIの開発を加速させることを目指しています。同社の主な顧客は、業界特化型のVLAスタートアップ(製造業向け、介護向け、ウェットラボ自動化向けなど)と、ヒューマノイドや産業ロボットを開発するロボットメーカーが中心です。
参考:Tetraz株式会社 https://tetraz.ai/ja/
2.RoboScale ― データ収集・整理・学習・評価のためのプラットフォーム概要
RoboScaleは、フィジカルAIの学習データを取り巻く全プロセスを統合的にカバーする、データインフラ・プラットフォームです。クラウドで稼働する管理ツール「RoboScale Cloud」と、ロボットの手元で動作するデータ収集ツール「RoboScale Recorder)」の2層構成で、データ収集の依頼から納品・学習までを一気通貫で支援します。
◆ プラットフォームの主要機能
- プロジェクト・データ収集依頼の管理:ロボット種別・タスク・必要データ量・納期・収集環境などの仕様を定義し、依頼から進捗管理までをダッシュボード上で一元的に運用できます。
- ロボット/アクチュエーター/カメラのマスター管理:使用ロボットの構成、モーター(アクチュエーター)の配置、カメラの本数や設置位置などをマスターデータとして登録・管理。どのデータがどのロボット構成で取得されたかを完全に紐づけられます。
- オペレーターアサインと収集オペレーション:データ収集依頼ごとにオペレーターを割り当て、ローカルのData Recorder上で実機を操作してデータを取得。マニュアル録画モードと、設定時間で自動的に区切る「自動モード」の両方に対応します。
- キャリブレーション情報の自動紐づけ:ロボットのキャリブレーション結果も収集データに自動紐づけ。後工程で「どの設定で取られたデータか」を追跡できます。
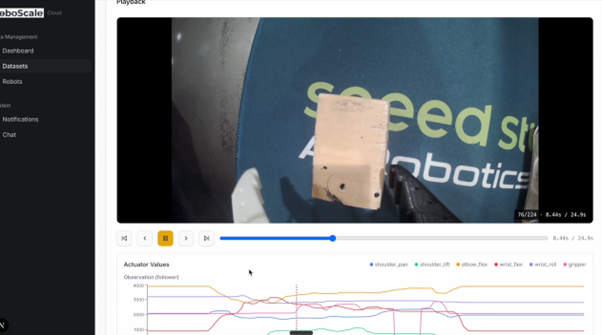
- 自動アップロードと可視化:ローカルで収集されたデータはSaaSへ自動アップロードされ、エピソード単位で再生・可視化・ダウンロードが可能。
- 品質評価用VLAモデルの自動学習:収集データに対し、基本的な動作が再現できる程度の簡易VLAモデルを自社側で学習・評価。データ品質を「モデル+精度レポート」のパッケージで担保します。
- Python向けライブラリ「RoboScaleDataset」:Hugging Faceデータセットと同等の使い勝手で、学習時にGPUへ必要分だけストリーミング配信。大容量のロボットデータをローカルにダウンロードする必要がありません。
◆ RoboScaleが解決する3つの課題
RoboScaleは、フィジカルAI開発者が直面する以下のような課題を、プラットフォーム1つで解消します。
第一に、ロボット調達と運用コストの課題です。学習データを収集するためには複数台のロボットを購入・設置し、専用スペース・オペレーターの採用と育成が必要になります。本来、検証用には1台あれば十分な開発組織が、データ収集のためだけに大規模な体制を抱え込まなければならないのが現状でした。RoboScaleは、これらを外部リソース化することで、開発者が本来注力すべきAIモデル開発に集中できる環境を提供します。
第二に、データ品質の確保という課題です。AI開発企業は基本的にAIモデルの専門家であり、「品質の良いデータの取り方」のノウハウを十分に持ち合わせていないことが多いのが実情です。データ量を確保しても、品質が伴わなければAIの性能は上がりません。RoboScaleは、訓練を受けたオペレーターと、自動・手動の品質フィルタリング(オペレーター自身が映り込んだ場合や、3D空間の軌道として外れ値となるエピソードの除外など)を組み合わせ、品質の高い学習データを提供します。
第三に、データの一元管理とトレーサビリティの課題です。ロボット学習データは「どのロボットで」「誰が」「いつ」「どこで」「どのタスクのために」「どのような設定で」収集したかという情報が多岐にわたります。これらが紐づいて管理されていないと、後でデータをフィルタリング・再利用しようとしたときに追跡できなくなります。RoboScaleでは、すべての関連情報をプロジェクト・ロボットマスターと紐づけて一元管理することで、データのライフタイム全体にわたる追跡可能性を担保しています。
◆ メリット ― 開発者が得られる価値
- ロボット・オペレーター・スペースを自前で抱える必要がなくなり、初期投資・固定費を大幅に削減できる
- 品質管理されたデータが、依頼から納品まで予定されたリードタイムで安定的に手に入る
- 収集データ・キャリブレーション情報・ロボット構成情報がすべて紐づけて管理され、後工程での再利用やデバッグが容易
- 品質評価用VLAモデルがセットで提供されるため、データ品質を客観的に判断できる
- Pythonライブラリ経由でGPUへストリーミング配信されるため、ストレージ運用負担も軽減
- 失敗エピソードや外れ値データを自動・手動でフィルタリングできるため、学習に効くデータを取り出しやすい
3.RoboScaleの利用方法イメージ
実際の利用フローをご紹介します。RoboScaleでは、依頼者(法人ユーザー)、オペレーター、運営側のシステムが連動しており、データ収集の依頼から納品までがクラウド上で完結します。
◆ STEP 1:プロジェクトの作成とメンバーアサイン
法人管理者ユーザーがログインし、ダッシュボードから新しいプロジェクトを作成します。プロジェクト単位でデータを管理する設計のため、社内メンバーをアサインして適切なアクセス権限を割り振ることが可能です。一般的なSaaSのデータ管理画面と同様の操作感で、導入のハードルは低く抑えられています。
◆ STEP 2:使用ロボットの登録
収集に使用するロボット情報を登録します。一般的に使われる学習用ロボットはマスターデータから引用可能で、ゼロから入力する必要はありません。アクチュエーター・カメラもマスターから選択して紐づけることで、どのデータがどのモーター構成・カメラ構成で取得されたものかが、後から完全に追跡できる状態でデータ収集が始まります。
◆ STEP 3:データ収集依頼の作成
プロジェクトに紐づける形で、データ収集依頼(リクエスト)を作成します。依頼名、対象ロボット、必要データ量、納期、収集環境(運営側で用意するか、依頼者側で提供するか)など、データの仕様書に相当する情報をフォーム上で入力します。ドラフト保存後にサブミットすれば、運営側システムに依頼が連携されます。
◆ STEP 4:オペレーターアサインとデータセット作成
運営側システムでは、受け付けた依頼に対してオペレーターをアサインし、見積もり・承認プロセスを経て収集作業を起動します。データセット単位で具体的な担当オペレーターを割り当てることで、収集の進捗を細かく管理することができます。
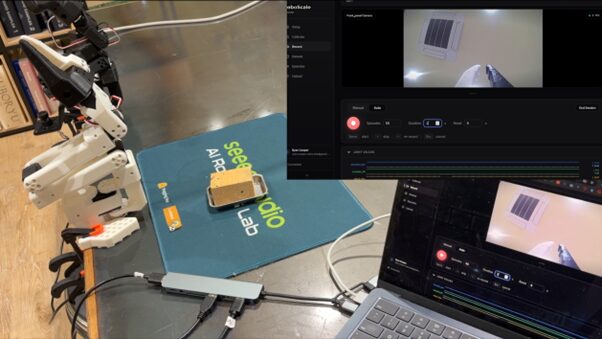
◆ STEP 5:オペレーターによる実機データ収集
オペレーター側のローカルアプリ「DataScale Recorder」を起動すると、アサインされたデータセット情報が表示されます。ロボットと接続し、必要に応じてキャリブレーションを実行(過去にキャリブレーション済みであれば、SaaS側からファイルを取得して再利用できます)。録画ボタンを押すとカメラ映像とモーター角度の同時取得が始まり、時系列データとして記録されます。
特筆すべきは「自動モード」の存在です。1エピソードあたりの収集時間や、収集するエピソード数を事前に設定しておけば、所定の時間ごとにエピソードが自動的に区切られ、効率よく大量のデータを連続収集できます。マニュアル録画では右カーソルキー「⇨」を押すたびに次のエピソードに進む運用も可能で、現場での収集スタイルに合わせて柔軟に運用できます。
◆ STEP 6:自動アップロードとSaaSでの一元管理
収集データは「Auto Upload」設定により、ローカル保存と同時にSaaSへ自動アップロードされます。SaaS側ではエピソード単位でデータがデータセットに追加され、エピソードの再生確認、データの可視化、ダウンロードが可能です。これにより、依頼者側はデータの納品状況を遠隔からリアルタイムに確認できます。
◆ STEP 7:学習データとしての配信 ― RoboScaleDatasetライブラリ
実際の学習フェーズでは、ダウンロードよりもストリーミング配信での利用が推奨されます。「robo-scale dataset」というPythonライブラリをインポートすれば、Hugging Faceデータセットと同等の感覚で、必要なエピソード・必要なフレームだけをサーバーからGPUへ直接ストリーミングできます。これにより、大容量のロボットデータを開発環境に丸ごとダウンロードする必要がなくなり、ストレージ管理の負担を最小限に抑えながら、効率的にVLAモデルを学習できます。
◆ 学習に効くデータの取捨選択
収集したデータの中には、学習に適したものと、不要・有害なものが混在します。RoboScaleはこの取捨選択を強力にサポートする設計になっています。具体的には、(1)オペレーターがマニュアルで「失敗エピソード」をラベリングする運用、(2)映像にオペレーター自身が映り込んでしまった場合や、暗くて使えない映像などを画像処理ベースで自動フィルタリング、(3)3D空間上での軌道を再構築して、外れ値的な動作を検出する、といった手法を組み合わせ、学習に効くデータを取り出しやすくしています。
◆ さまざまなロボットへの対応
卓上型協働ロボットを代表に、ヒューマノイドを含めたより幅広いロボットへの対応も視野に入れるとともに、世界モデルやreal2sim2realを活かしたデータ拡張などの開発にも取り組んでいます。市場に存在するロボットの相当数をカバーできる設計です。
参考:RoboScale(Tetraz株式会社) https://tetraz.ai/ja/
コメント
-
本Webサイトの運営担当者です。2005年から、産学官連携や産業振興の業務に携わっています。
コメント
フィジカルAIの開発において、最大の肝はロボット学習データの収集と活用です。アルゴリズムやモデルアーキテクチャは日進月歩で進化し、3ヶ月から半年で新しいモデルが旧モデルを踏み台にして登場していく一方、その土台となる「データ」は陳腐化しません。むしろ、データこそが長期にわたって価値を維持し続ける、フィジカルAI開発における最も本質的な資産です。
Tetraz株式会社の「RoboScale」は、この“データ問題”に真正面から取り組むサービスであり、その点の高度化に明確に特化しています。デモ動画を拝見すると、プロジェクト作成からロボット登録、データ収集依頼、オペレーターアサイン、実機での収集、自動アップロード、学習用ライブラリでの配信までが一気通貫で設計されており、汎用的でありながら使い勝手も非常に良いサービスであることが直感的に理解できました。SaaS側のダッシュボードとローカルのData Recorderが滑らかに連動し、収集データに対してロボット構成・キャリブレーション情報・オペレーター情報といったメタデータが自動で紐づけられる設計は、後工程でのデータ追跡・再利用を考えたときに極めて合理的だと感じました。
特に印象的だったのは、実際のロボット挙動データの中には学習に適したデータと不要なデータが入り混じる中で、学習に役立つデータを上手く活かせる仕組みが組み込まれている点です。失敗エピソードのマニュアルラベリングはもちろん、画像処理によるオペレーター映り込みの自動検出、3D空間上の軌道再構築による外れ値検出など、機械的なフィルタリング機能までしっかりと用意されています。さらに、品質評価用のVLAモデルがデータに添えて提供されることで、データの品質を客観的に把握できる点も実務的に大きなメリットです。
ロボットやオペレーターを自前で抱える必要がなくなる構造は、フィジカルAI開発の参入障壁を大きく引き下げます。これまで「ロボット調達と運用」というハードウェア側の負荷に阻まれて開発に着手できなかった企業にとって、まさに突破口となるはずです。多くの方がフィジカルAIの開発への着手を検討されていると思いますが、その基本ツールとして本プラットフォームの活用をぜひ検討していただきたいと思います。このコメントと投稿者はデジタル証明書(VC)によって真正性が保証されています。
このコメントと投稿者情報は、「改竄されていないか」や「正当な投稿者か」などを暗号学的に検証できる〈Verifiable Credential(VC)〉によって保証されています。
それらがシステム上で検証された後に記事にコメントとして表示されています。VCとは
VC(Verifiable Credential)は、デジタル空間で「改ざんが検知可能」かつ「即座に検証可能」な証明書です。
紙の証明書やPDFと異なり、暗号技術により真正性が数学的に保証されており、W3Cにより制定された国際標準規格です。
基盤技術・サービスの
他の記事を読む
-

基盤技術・サービス
クラウドカメラが育てるAIプラットフォーム セーフィーが描くフィジカルAIの未来
セーフィー株式会社
- 関連分野・業種
- 製造、物流・倉庫、建設・インフラ、モビリティ、医療・ヘルスケア、介護・福祉、農業・一次産業、小売・店舗、サービス・施設運用、公共
-

基盤技術・サービス
フィジカルAIを動かす通信インフラ — 10年のIoTで鍛えたソラコムのキャリア回線という選択肢
株式会社ソラコム
- 関連分野・業種
- 製造、物流・倉庫、建設・インフラ、モビリティ、医療・ヘルスケア、介護・福祉、農業・一次産業、小売・店舗
-
基盤技術・サービス
ロボティクスとAIの両軸で実装するフィジカルAI開発と「AIコワーカー」が拓くロボット導入の新しい入口
合同会社WillRobotics
- 関連分野・業種
- 製造、物流・倉庫、建設・インフラ、モビリティ、医療・ヘルスケア、介護・福祉、農業・一次産業、小売・店舗
-

基盤技術・サービス
フィジカルAIの中核技術『世界モデル』が製造業の現場を変える—株式会社エイシングの挑戦
株式会社エイシング
- 関連分野・業種
- 製造
須藤 慎
記事作成者
株式会社キャンパスクリエイト・専務取締役・プロデューサー