「好奇心」や「長期記憶」を持つロボットが、フィジカルAIの未来を先導する
基盤技術・サービス
- 関連分野・業種
- 製造、物流・倉庫、建設・インフラ、モビリティ、医療・ヘルスケア、介護・福祉、農業・一次産業、小売・店舗、サービス・施設運用、公共
公開日
- ヒアリング先
- 株式会社Forcesteed Robotics(フォースティードロボティクス)執行役員 CVO 角谷 雄一 氏
株式会社Forcesteed Robotics(フォースティードロボティクス)は、2024年7月に設立されたフィジカルAIのスタートアップです。「人工意識(Artificial Consciousness:AC)」を中核技術として、ロボットや自律移動体に「好奇心」や「長期記憶」を持たせ、現場環境に応じて自律的に学習・判断できる次世代AIプラットフォームの開発に取り組んでいます。高速開発力と、現場を知り抜いた実装力が強みです。本記事では、同社が保有するフィジカルAI技術の全体像と、人工意識アーキテクチャが実現する安全監視システムへの活用可能性について詳しく紹介します。
1. 株式会社Forcesteed Roboticsとは
Forcesteed Roboticsは、フィジカルAIに関するコンサルティング・共同研究・委託開発・代理店事業の4つを柱とするスタートアップです。同社の技術は「大脳系・頭脳系」「小脳系・運動系」「空間認知系」の3領域にわたり、それらをロボット用VLM/LLMエージェントとして統合した「人工意識(AC)」が最上位に位置づけられています。
① 大脳系・頭脳系:状況理解と意思決定
VLM(視覚言語モデル)やVLA(視覚言語行動モデル)関連技術、LLMのファインチューニング、RAG(検索拡張生成)など、カメラ映像から状況を「意味として理解」し、常識・ドメイン知識をもとに判断する技術群です。従来の画像認識AIがあらかじめ学習させた物体しか検出できないのに対し、VLM・LLMを組み合わせることでシーン全体を文章として解釈し、未知の状況にも柔軟に対応できます。
② 小脳系・運動系:体を動かす制御技術
ロボットの動作計画(パスプランニング・モーションプランニング)、模倣学習(人が手を動かして教示するシステムと学習モデル)、RobotLLMモデル、シミュレーションなど、ロボットの身体制御に関わる技術を幅広くカバーしています。ヒューマノイドを含む各種ロボットの「動かす」部分の実装を担います。
③ 空間認知系:環境を3次元で把握する技術
自己位置同定(SLAM)、セマンティックマップ生成、3次元データ処理といった技術で、ロボットが「どこにいるか」「周囲に何があるか」を空間として認識します。

2. 人工意識アーキテクチャACとは何か
Forcesteed Roboticsが独自開発する「人工意識AC」は、同社の最も先進的な技術コンセプトです。
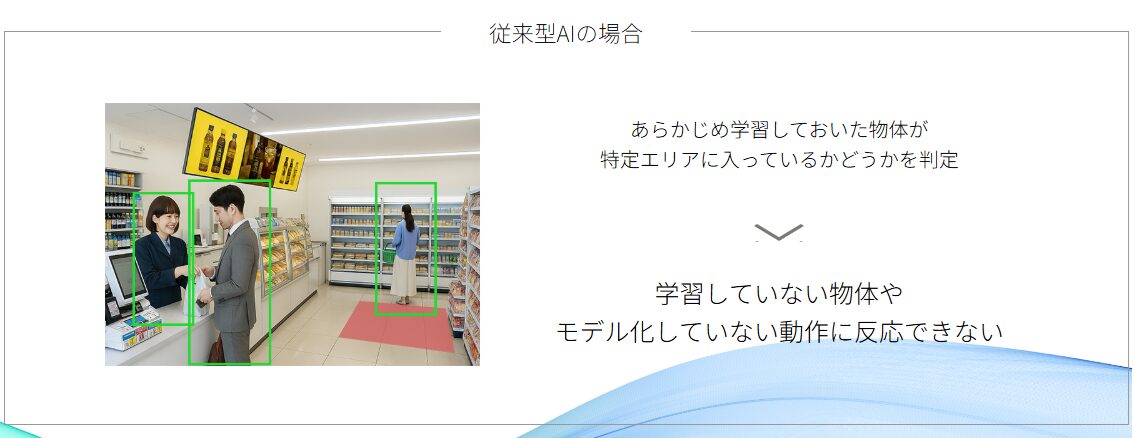
フィジカルAIの現場活用において、従来型AIと人工意識ACの最大の違いは「あらかじめ決めたルールに従うか、状況を理解して自ら判断するか」という点にあります。防犯カメラへの適用を例に、その違いを具体的に見ていきましょう。
従来型AIの動作:ルールベースの検知
従来の画像認識AIは、「人を検出する」「特定エリアへの侵入を検知する」といったように、あらかじめ学習させた物体やモデル化した動作に対してYes/Noで判断します。例えば、スマートウォッチの着用を禁止したい場合、スマートウォッチをあらかじめ学習させなければ検知できません。また「ペットボトルを飲みながら食べている」という複合行動は、「食べている」という動作をモデル化していなければ検知できないといった限界があります。
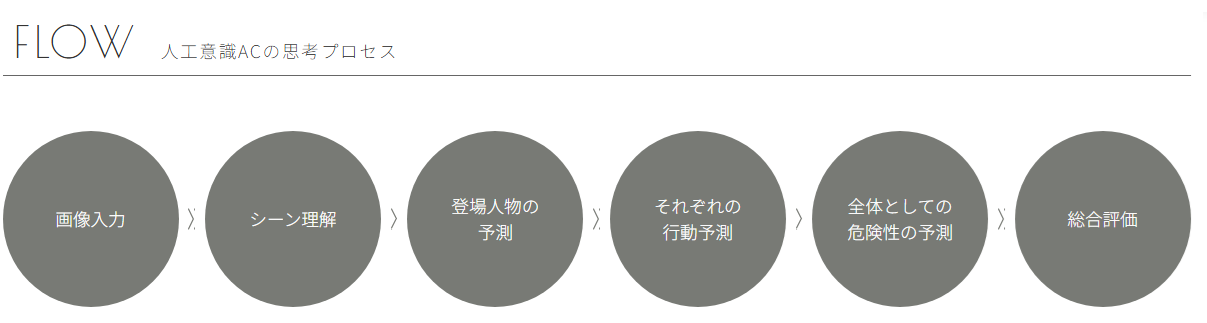
 人工意識AC:シーン理解から始まる思考プロセス
人工意識AC:シーン理解から始まる思考プロセス
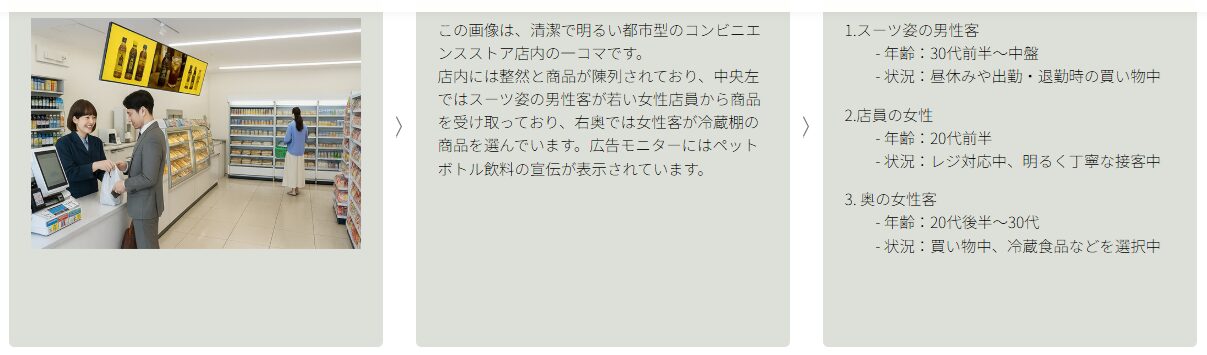
人工意識ACを搭載したシステムは、VLMがカメラ映像をシーン全体として解釈し、「コンビニのレジ前でサラリーマンが商品を受け取っている」といった自然言語レベルの状況把握が可能です。さらにLLMがその文字列と常識・ドメイン知識を組み合わせて「この状況において何をすべきか」を自律判断します。
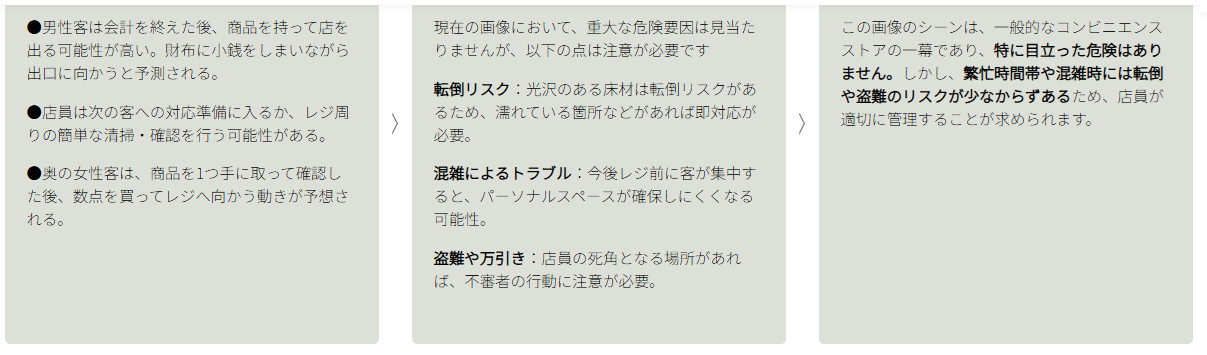
例えば、棚の周りを繰り返しウロウロしている人物に対して、「万引きに特有の行動パターン」という常識をもとに、声かけを行うロボットへ指示を出したり、通報先に通知したりすることができます。これはあらかじめ「ウロウロする行動=万引き」と学習させていなくても判断できる点が、従来型AIとの本質的な違いです。
3. 人工意識の活用イメージ:安全監視システムへの応用
ユースケース①:AI警備による人件費の最小化
監視モニターのチェック業務の自動化を推進します。人手による常時監視を段階的に削減し、異常を検知した際にはAIが即時に通知します。巡回中の警備員または警備ロボットへリアルタイムで指令を送信することで、以下の効果が期待されます。
- 複数カメラ映像の常時チェックをAIが代替することで、モニタリング業務の工数を大幅に削減。
- 人の気づきよりも早く異常を検知し、即時に現場へ指示を出すことで対応スピードが向上。
- 常駐監視人員を最小限にし、現場巡回や即応対応へリソースを集中させることで警備員の配置を最適化。
- 見落としや対応遅れのリスクをAIでカバーし、人的ミスを低減。
ユースケース②:店内監視カメラ連動による店員人件費の最小化
監視カメラの映像をAIが解析し、床の汚れを自動検知して清掃スタッフの携帯端末に清掃指示を送信します。また巡回ロボットが棚の欠品や異常を検知して店舗スタッフに補充・確認指示を送ることで、清掃員・店員の作業効率向上と、ムダ工数削減による人件費の最適化を実現します。
コンセプトロボット「Guardian(ガーディアン)」
上記のユースケースを体現する同社のコンセプトロボットが「Guardian」です。既存の4脚ロボットの上に人工意識ACをポン付けするだけでAI搭載ロボットへと変える設計になっており、点検・警備・監視・報告のタスクを自律的にこなします。

まとめ
Forcesteed Roboticsは、フィジカルAIの「頭脳を作る」ことに特化した稀有なスタートアップです。従来型AIがルールベースの検知しかできなかったのに対し、同社の人工意識ACはVLM・LLMによるシーン理解と、好奇心モジュールによる継続学習を組み合わせることで、ロボットが現場の常識をもとに自律判断・行動できる環境を実現します。
株式会社Forcesteed Robotics:https://www.forcesteed.com/
コメント
-
本Webサイトの運営担当者です。2005年から、産学官連携や産業振興の業務に携わっています。
コメント
フィジカルAIの社会実装を考える上で、今回のヒアリングで最も腑に落ちたのは、VLM(視覚言語モデル)が中核的な要素技術になっていくという点でした。従来の画像認識AIは、学習済みの対象を「検出する」ことは得意でも、現場で起きる出来事を文脈ごと理解し、未知の状況に柔軟に対処するには限界があります。だからこそ、映像を意味として捉え、常識やドメイン知識と接続して判断できるVLM/LLM系のアプローチが、これからのフィジカルAIで決定的な差を生む大きな方向性であることを、具体的なユースケースとともに示してくれる内容でした。
その中でもForcesteed Robotics様は、技術の幅と実装力が際立っています。状況理解・意思決定だけでなく、ロボットを実際に動かす制御、環境を把握する空間認知までを射程に入れ、それらを統合する構想を持っています。特に「好奇心」を持つロボットを開発することで、現場の事象に対して自ら学び続け、適応する能力を高めている点が印象的でした。さらに「人工意識(AC)」というアーキテクチャで、継続的な学習を行う仕組みを組み込んでいる点も特筆すべきです。
加えて、豊富な技術シーズ群に加え、製造業・ロボティクスの現場を知り尽くしたメンバーによる高速な開発体制です。フィジカルAIを活用したロボット開発、あるいは用途開発を検討されている企業の方にとって、Forcesteed Robotics様は相談すべきパートナーの一社だと感じました。このコメントと投稿者はデジタル証明書(VC)によって真正性が保証されています。
このコメントと投稿者情報は、「改竄されていないか」や「正当な投稿者か」などを暗号学的に検証できる〈Verifiable Credential(VC)〉によって保証されています。
それらがシステム上で検証された後に記事にコメントとして表示されています。VCとは
VC(Verifiable Credential)は、デジタル空間で「改ざんが検知可能」かつ「即座に検証可能」な証明書です。
紙の証明書やPDFと異なり、暗号技術により真正性が数学的に保証されており、W3Cにより制定された国際標準規格です。eyJraWQiOiJMZ18zaTdiajNDRFNLcVUtamdZeXdsQ0tualUzWnZMbXJsRmNyT2NuektJIiwidHlwIjoiZGMrc2Qtand0IiwiYWxnIjoiRVMyNTYifQ.eyJpc3MiOiJodHRwczovL2NhbXB1cy1jcmVhdGUtaXNzdWVyLnByb2QuY2FtcHVzLWNyZWF0ZS1zc2kuY29tIiwiaWF0IjoxNzczNzk5MjM0LCJuYmYiOjE3NzM3OTkyMzQsImV4cCI6NDEzMzg5NDQwMCwidmN0IjoiaHR0cHM6Ly9jYW1wdXMtY3JlYXRlLWlzc3Vlci5wcm9kLmNhbXB1cy1jcmVhdGUtc3NpLmNvbS9jcmVkZW50aWFscy9JbnZpdGF0aW9uYWxDb21tZW50Q3JlZGVudGlhbCIsImNuZiI6eyJqd2siOnsiYWxnIjoiRVMyNTYiLCJ1c2UiOiJzaWciLCJrdHkiOiJFQyIsImNydiI6IlAtMjU2IiwieCI6IkxtaTFzYzl3TnVoVDJfRkp5RnN4U01CWDlwaXQ4TGtNZ2owTlVKbl85U0kiLCJ5IjoiRy1Fcl9XOTJOVGxzdjdTcThVYnhOMUpKYk1MMXBPbFBhWlVoQ1BsaFRpcyJ9fSwic3RhdHVzIjp7InR5cGUiOiJCaXRzdHJpbmdTdGF0dXNMaXN0RW50cnkiLCJpZCI6Imh0dHBzOi8vY2FtcHVzLWNyZWF0ZS1pc3N1ZXIucHJvZC5jYW1wdXMtY3JlYXRlLXNzaS5jb20vc3RhdHVzLWxpc3QvMzg5Y2ZmNWMtMDg3OC00MjAwLWI2NzUtZmUwMDc1NTg3M2NkLzE1Iiwic3RhdHVzUHVycG9zZSI6InJldm9jYXRpb24iLCJzdGF0dXNMaXN0SW5kZXgiOjE1LCJzdGF0dXNMaXN0Q3JlZGVudGlhbCI6Imh0dHBzOi8vY2FtcHVzLWNyZWF0ZS1pc3N1ZXIucHJvZC5jYW1wdXMtY3JlYXRlLXNzaS5jb20vc3RhdHVzLWxpc3QvMzg5Y2ZmNWMtMDg3OC00MjAwLWI2NzUtZmUwMDc1NTg3M2NkIn0sImRpc2Nsb3N1cmVGcmFtZSI6eyJfc2QiOlsiaWQiLCJhcnRpY2xlX3JlZiIsImNhbm9uaWNhbF91cmwiLCJwb3NpdGlvbiIsImNvbW1lbnQiLCJmdWxsTmFtZSIsImVtYWlsIiwib3JnYW5pemF0aW9uIiwiZGVwYXJ0bWVudCIsImpvYlRpdGxlIiwiYmlvIl19LCJfc2QiOlsiMUJqbS1NcmtfTktMa0NqMGptN25tbXg1MU1jNTdpaXMtMlNYblFxOF96TSIsIjlyZXNUSFdLZV92QmRvSXBGQmxTWkxVc0djbmlSd0xmVzFhS0QxR3kxb2siLCJJdUhSSFo3eUszcUhGcm5hTlNiaVE5QmJWNmN3a3V0bUM0VE9jVzZMSDJnIiwiTWdCM3JQRnRJamI2QWJyM3B1SlF1dVB4Y3ByWThCbVV4ajZyLTQyQmZUcyIsIlBFR0o0RVRPb0l2ZVNLSkM5OFFTSTNsQjlFZ1dwdGRnR0UxdEs5cHFwQXciLCJQdncyR3MxNm90MFR4Slp0YzFRWU4wbWpYZVdGT2VxbmFpVUVSc3hCa19RIiwiVC1yRGFpVlUza056TlJxdUg5NWNHdnZyY3Vtd09CRUl5dEpHSmE2RTVKQSIsImItWG44VkxiY1Q0YTlKNHNsRkItZjh2dDdLMVBSNElnSHU2NlE5RW9MdG8iLCJyYWhkaVlyNlZDYzdoTzl6V3dkX1czajlETHJjRDdDVFZFblBuUVo0QVZBIiwid1FCY2VmSzZqSG5QRjV4dkFfTDlyb1RJRGI1RXAwYVFqcG91ZGppYXlQUSIsInpkTFlvUkR4aEp2NERCMEprZE9CSXlZRnNDcGtwd3o1b3VRTWI0TW4xcjQiXSwiX3NkX2FsZyI6InNoYS0yNTYifQ.SFMRf6Dnnboem6_scyzGe1htfN20F-DU4n-a43Wr9o9tCfYZQCrlnkidPK-dFEq-Y747teyPmrjTKlvP_aAMkw~WyI3Y2RjZDg2OC02MWVmLTQxMWUtYWM3Ni05ZjBlMTRlMWQxMmEiLCJpZCIsImRpZDpqd2s6ZXlKaGJHY2lPaUpGVXpJMU5pSXNJblZ6WlNJNkluTnBaeUlzSW10MGVTSTZJa1ZESWl3aVkzSjJJam9pVUMweU5UWWlMQ0o0SWpvaVRHMXBNWE5qT1hkT2RXaFVNbDlHU25sR2MzaFRUVUpZT1hCcGREaE1hMDFuYWpCT1ZVcHVYemxUU1NJc0lua2lPaUpITFVWeVgxYzVNazVVYkhOMk4xTnhPRlZpZUU0eFNrcGlUVXd4Y0U5c1VHRmFWV2hEVUd4b1ZHbHpJbjAiXQ~WyJkMTNlYzYyYy1hZTc1LTRmZTMtYTkwOS04MGEwMWE3ZWMyZmMiLCJhcnRpY2xlX3JlZiIsInBoeXNpY2FsLWFpLWNvbHVtbi03OCJd~WyI0NTU0NGVhYi1mNTQyLTQxOTUtYjdkNy05NjczYWI0NTEyZTgiLCJjYW5vbmljYWxfdXJsIiwiaHR0cHM6Ly93d3cuY2FtcHVzY3JlYXRlLmNvbS9waHlzaWNhbC1haS9jb2x1bW4vNzgvIl0~WyIzZGM4ZmJjOS04MDIyLTRiMDUtOWU5OC0yY2ExNWU0N2YyZWMiLCJwb3NpdGlvbiIsIndyaXRlciJd~WyIyMmIxMTY0Ni03Nzk1LTQwNmUtOGU5Ny02NWIwZmNlYTA3ZjciLCJjb21tZW50Iiwi44OV44Kj44K444Kr44OrQUnjga7npL7kvJrlrp_oo4XjgpLogIPjgYjjgovkuIrjgafjgIHku4rlm57jga7jg5LjgqLjg6rjg7PjgrDjgafmnIDjgoLohZHjgavokL3jgaHjgZ_jga7jga_jgIFWTE3vvIjoppbopproqIDoqp7jg6Ljg4fjg6vvvInjgYzkuK3moLjnmoTjgaropoHntKDmioDooZPjgavjgarjgaPjgabjgYTjgY_jgajjgYTjgYbngrnjgafjgZfjgZ_jgILlvpPmnaXjga7nlLvlg4_oqo3orZhBSeOBr-OAgeWtpue_kua4iOOBv-OBruWvvuixoeOCkuOAjOaknOWHuuOBmeOCi-OAjeOBk-OBqOOBr-W-l-aEj-OBp-OCguOAgeePvuWgtOOBp-i1t-OBjeOCi-WHuuadpeS6i-OCkuaWh-iEiOOBlOOBqOeQhuino-OBl-OAgeacquefpeOBrueKtuazgeOBq-aflOi7n-OBq-WvvuWHpuOBmeOCi-OBq-OBr-mZkOeVjOOBjOOBguOCiuOBvuOBmeOAguOBoOOBi-OCieOBk-OBneOAgeaYoOWDj-OCkuaEj-WRs-OBqOOBl-OBpuaNieOBiOOAgeW4uOitmOOChOODieODoeOCpOODs-efpeitmOOBqOaOpee2muOBl-OBpuWIpOaWreOBp-OBjeOCi1ZMTS9MTE3ns7vjga7jgqLjg5fjg63jg7zjg4HjgYzjgIHjgZPjgozjgYvjgonjga7jg5XjgqPjgrjjgqvjg6tBSeOBp-axuuWumueahOOBquW3ruOCkueUn-OCgOWkp-OBjeOBquaWueWQkeaAp-OBp-OBguOCi-OBk-OBqOOCkuOAgeWFt-S9k-eahOOBquODpuODvOOCueOCseODvOOCueOBqOOBqOOCguOBq-ekuuOBl-OBpuOBj-OCjOOCi-WGheWuueOBp-OBl-OBn-OAglxu44Gd44Gu5Lit44Gn44KCRm9yY2VzdGVlZCBSb2JvdGljc-anmOOBr-OAgeaKgOihk-OBruW5heOBqOWun-ijheWKm-OBjOmam-eri-OBo-OBpuOBhOOBvuOBmeOAgueKtuazgeeQhuino-ODu-aEj-aAneaxuuWumuOBoOOBkeOBp-OBquOBj-OAgeODreODnOODg-ODiOOCkuWun-mam-OBq-WLleOBi-OBmeWItuW-oeOAgeeSsOWig-OCkuaKiuaPoeOBmeOCi-epuumWk-iqjeefpeOBvuOBp-OCkuWwhOeoi-OBq-WFpeOCjOOAgeOBneOCjOOCieOCkue1seWQiOOBmeOCi-ani-aDs-OCkuaMgeOBo-OBpuOBhOOBvuOBmeOAgueJueOBq-OAjOWlveWlh-W_g-OAjeOCkuaMgeOBpOODreODnOODg-ODiOOCkumWi-eZuuOBmeOCi-OBk-OBqOOBp-OAgeePvuWgtOOBruS6i-ixoeOBq-WvvuOBl-OBpuiHquOCieWtpuOBs-e2muOBkeOAgemBqeW_nOOBmeOCi-iDveWKm-OCkumrmOOCgeOBpuOBhOOCi-eCueOBjOWNsOixoeeahOOBp-OBl-OBn-OAguOBleOCieOBq-OAjOS6uuW3peaEj-itmO-8iEFD77yJ44CN44Go44GE44GG44Ki44O844Kt44OG44Kv44OB44Oj44Gn44CB57aZ57aa55qE44Gq5a2m57-S44KS6KGM44GG5LuV57WE44G_44KS57WE44G_6L6844KT44Gn44GE44KL54K544KC54m5562G44GZ44G544GN44Gn44GZ44CCXG7liqDjgYjjgabjgIHosYrlr4zjgarmioDooZPjgrfjg7zjgrrnvqTjgavliqDjgYjjgIHoo73pgKDmpa3jg7vjg63jg5zjg4bjgqPjgq_jgrnjga7nj77loLTjgpLnn6XjgorlsL3jgY_jgZfjgZ_jg6Hjg7Pjg5Djg7zjgavjgojjgovpq5jpgJ_jgarplovnmbrkvZPliLbjgafjgZnjgILjg5XjgqPjgrjjgqvjg6tBSeOCkua0u-eUqOOBl-OBn-ODreODnOODg-ODiOmWi-eZuuOAgeOBguOCi-OBhOOBr-eUqOmAlOmWi-eZuuOCkuaknOiojuOBleOCjOOBpuOBhOOCi-S8gealreOBruaWueOBq-OBqOOBo-OBpuOAgUZvcmNlc3RlZWQgUm9ib3RpY3Pmp5jjga_nm7joq4fjgZnjgbnjgY3jg5Hjg7zjg4jjg4rjg7zjga7kuIDnpL7jgaDjgajmhJ_jgZjjgb7jgZfjgZ_jgIIiXQ~WyIyNzk3N2I1Ni1lNmM1LTRhZmItYmI0NC1kMTU4ODI1MjU1ODEiLCJmdWxsTmFtZSIsIumgiOiXpCDmhY4iXQ~WyI3NjMxZmUyZi03MzYwLTRkN2YtOGNjYS05NmRhNTI2Yzg4MGYiLCJlbWFpbCIsInN1ZG9oQGNhbXB1c2NyZWF0ZS5jb20iXQ~WyIyODIzNGM4OS1iYjExLTQ0MDgtODAxNy1hMTQyNjNjZDMxYTQiLCJvcmdhbml6YXRpb24iLCLmoKrlvI_kvJrnpL7jgq3jg6Pjg7Pjg5Hjgrnjgq_jg6rjgqjjgqTjg4giXQ~WyI1N2Q2NjEzOC01Y2UzLTRkYjgtOTU4MC00NWU3Y2ZhYWU4ZTUiLCJkZXBhcnRtZW50Iiwi5bCC5YuZ5Y-W57eg5b25Il0~WyI4MGZiNjliNy00YWE0LTRhNTctOTBlYy1jZTdlMjEzY2FkMmMiLCJqb2JUaXRsZSIsIuODl-ODreODh-ODpeODvOOCteODvCJd~WyIyOGI0YzUzZC03NjYwLTQ2ZGUtYWI0MC1mZjgzMGNiNDc1ODYiLCJiaW8iLCLmnKxXZWLjgrXjgqTjg4jjga7pgYvllrbmi4XlvZPogIXjgafjgZnjgIIyMDA15bm044GL44KJ44CB55Sj5a2m5a6Y6YCj5pC644KE55Sj5qWt5oyv6IiI44Gu5qWt5YuZ44Gr5pC644KP44Gj44Gm44GE44G-44GZ44CCIl0~

須藤 慎
記事作成者
株式会社キャンパスクリエイト・専務取締役・プロデューサー