【簡略図】
【背景】
PID 制御に代表されるように,制御器の構造が既に決められており,その制御パラメータを適切にチューニングしなければならない状況は数多くの場面で想定されます。たとえば、稼働状況にある制御器の保守点検のために制御パラメータを再チューニングする場合や、製造プロセスにおいて、使う材料や扱う製品が変更した場合に各々の特性に合わせて制御器をチューニングしなければならない場合など、実応用の観点からの制御器チューニングへのニーズは 非常に高いといえます。
このような所望の応答を得る制御系を設計するためには、制御対象のデータ情報から数式モデルを作成して、最適な制御器パラメータを求める方法が一般的に用いられます。このアプローチでは、数式モデルを得るための実験に多大な時間や費用がかかることと、得られた数式モデルから制御系を設計しても望ましい応答を得るためのチューニング作業に多大な時間や費用がかかってしまうことが少なくありません。また、制御系に詳しい人材でなければ作業を行うことはできません。これは、コストパフォーマンスや納期などの観点からは必ずしも望ましい設計方法ではない状況ともなり、少しでも短時間でかつ低コストで制御器設計できることが求められています。
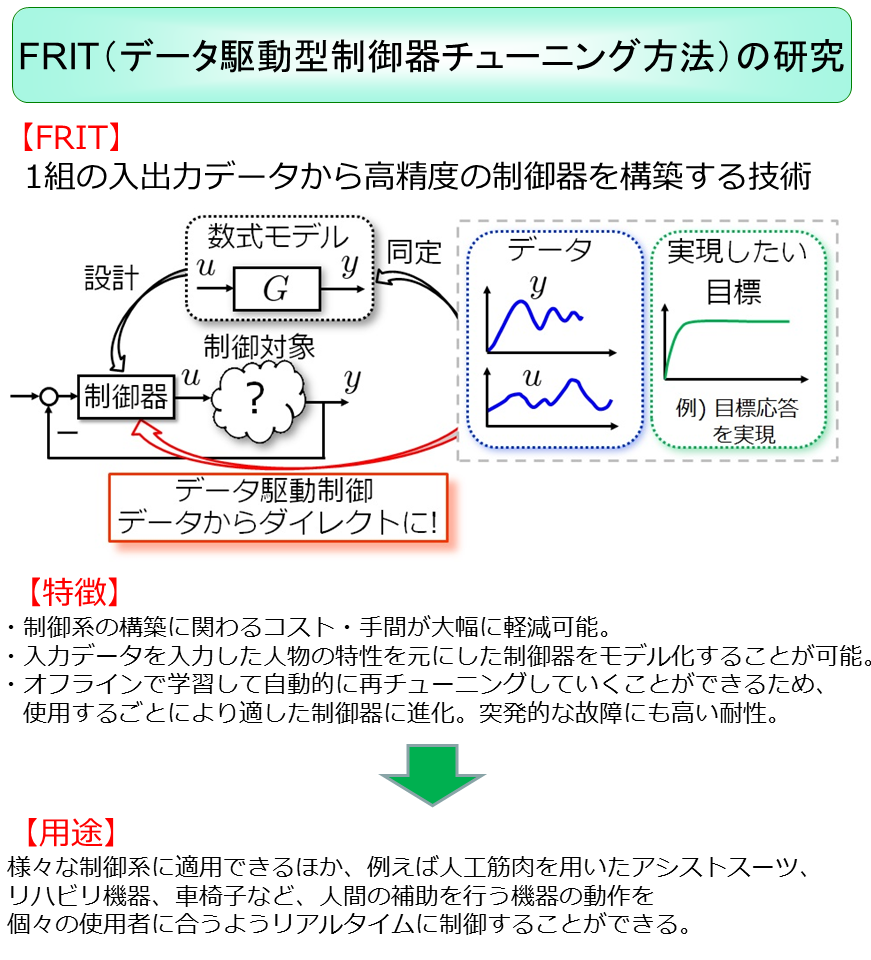
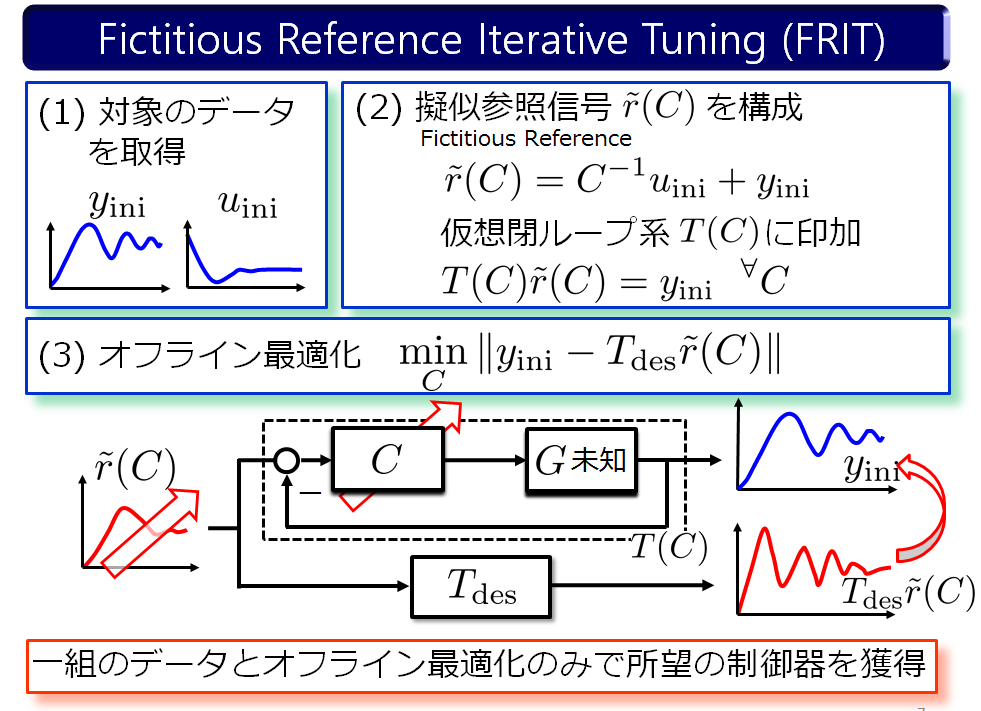
そこで金子教授は、一回のみの実験から数式モデルを直接介さずに良質な制御器を獲得する手法「FRIT(Fictitious Reference Iterative Tuning)」を研究しています。これは下記に示すデータ駆動制御(データから直接制御器をつくる)アプローチの一つでFRITは一組のデータのみで所望の応答を達成する制御器を得る方法です。
本技術の活用について意欲がある企業を歓迎いたします。
【技術内容】
下記はデータ駆動制御(データから直接制御器をつくる)アプローチの一つで、FRITは一組のデータのみで所望の応答を達成する制御器を得る方法です。
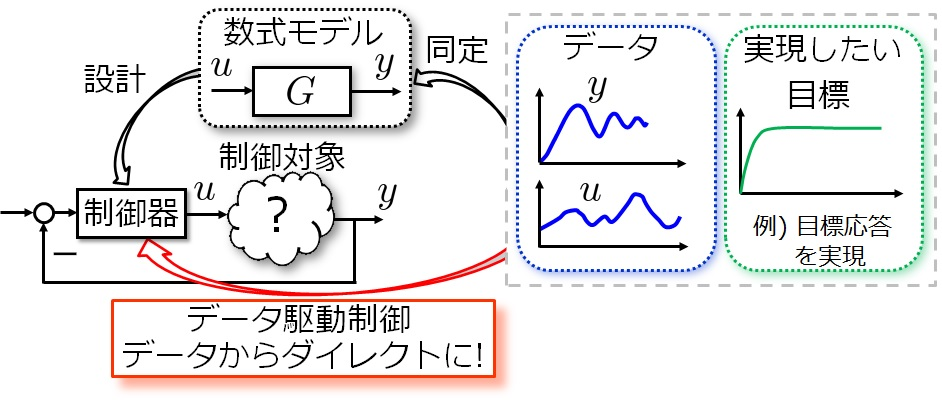
データ駆動制御の基本方針
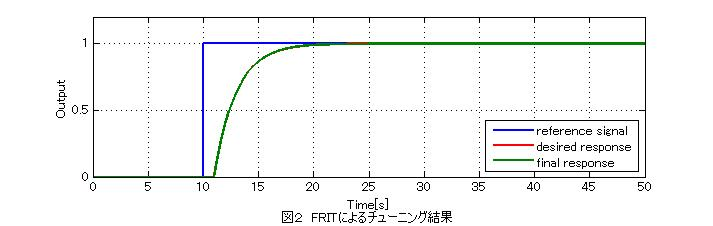
例えば、図1のようなデータのみ得られている状況で、FRIT を用いると、
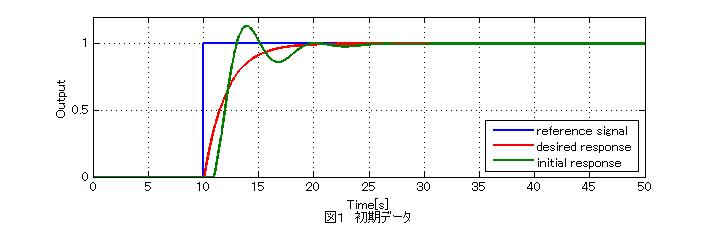
図2のような所望の動特性を達成する制御パラメータを獲得できます。
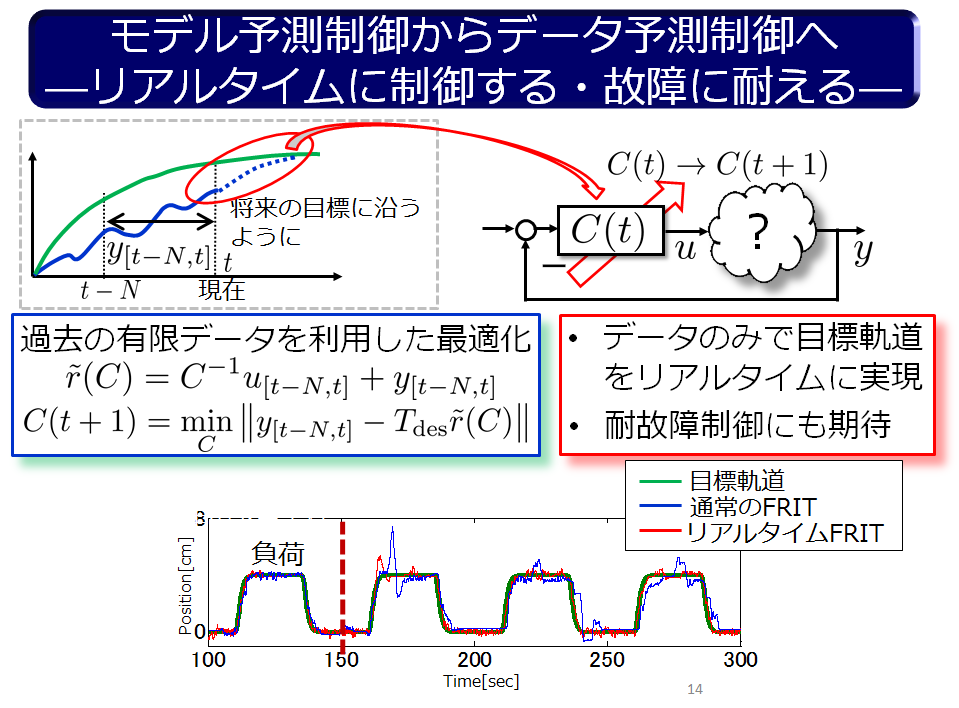
また、オフラインで学習が可能なため、特徴的な入力データや、入力データの挙動の変化に対して、リアルタイムに適した制御を行うことが可能です。さらに、突発的な故障が発生した時の入力データの異常の変化にも対応可能です。
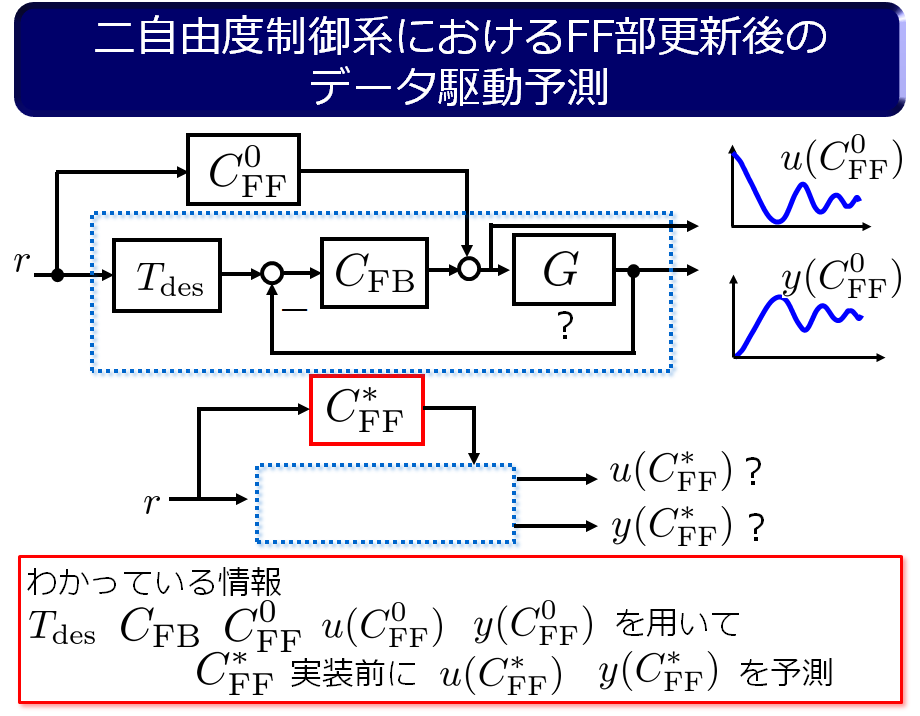
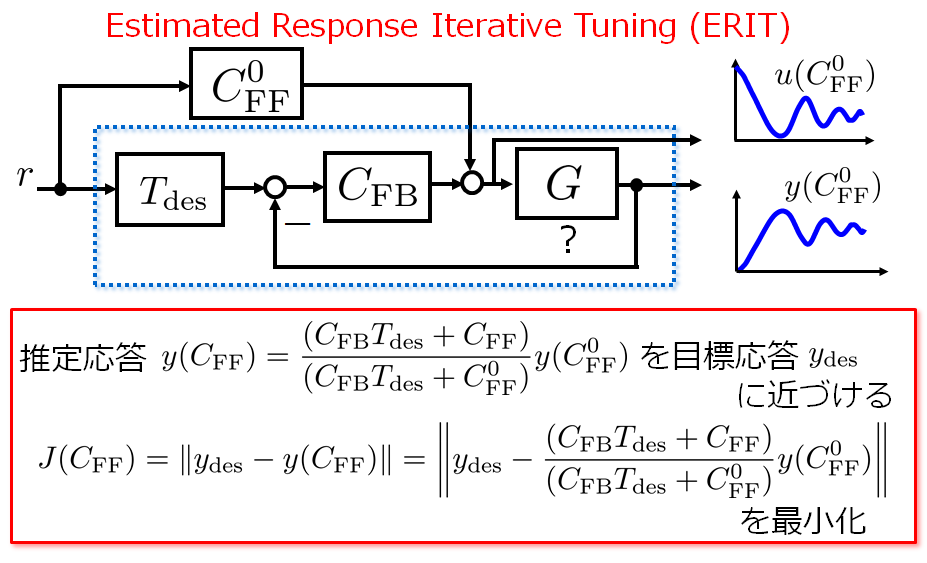
二自由度制御系において、既知の情報から適切な制御系を予測する事例は下記の通りです。
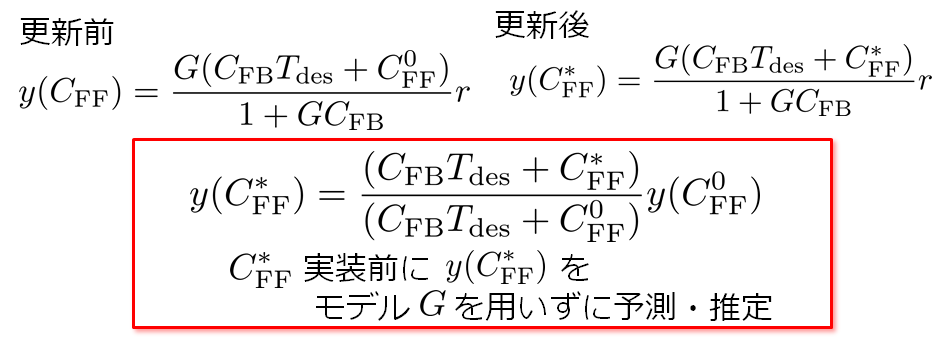
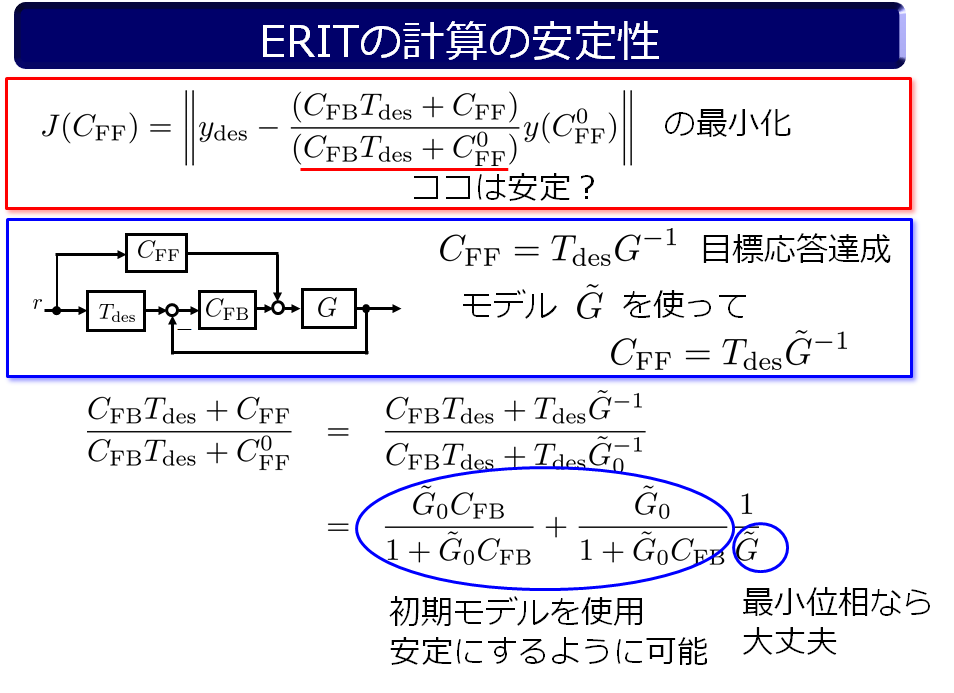
また、2自由度系で予測推定した応答が目標応答により近づくよう、更新を行う制御方式(ERIT)も研究を進めています。
上記は2自由度系を対象とした事例ですが、1自由度系にも応用可能な制御方式(VIMT)も研究を行っています。
【技術・ノウハウの強み(新規性、優位性、有用性)】
・制御系の構築に関わるコスト・手間が大幅に軽減可能です。
・入力データを入力した人物の特性を元にした制御器をモデル化することが可能です。
・オフラインで学習して自動的に再チューニングしていくことができるため、使用するごとにより適した制御器に進化していきます。また、突発的な故障にも耐性が高いです。
【連携企業のイメージ】
制御理論に興味がある企業を歓迎いたします。
例えば、下記の企業と連携できる可能性があります。
1)制御系システムの設計・開発を事業としている企業
2)製品の一部に要素技術として制御系を使用している企業
3)他、本技術の活用に意欲がある企業
【技術・ノウハウの活用シーン(イメージ)】
独自の制御理論に基づく技術ですが、様々な用途へ応用できます。
下記は一つの事例ですが、人工筋肉でバルブを開閉する制御です。
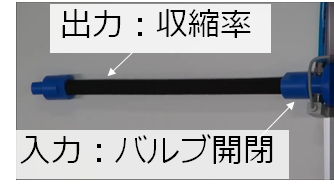
(空気圧人工筋肉)
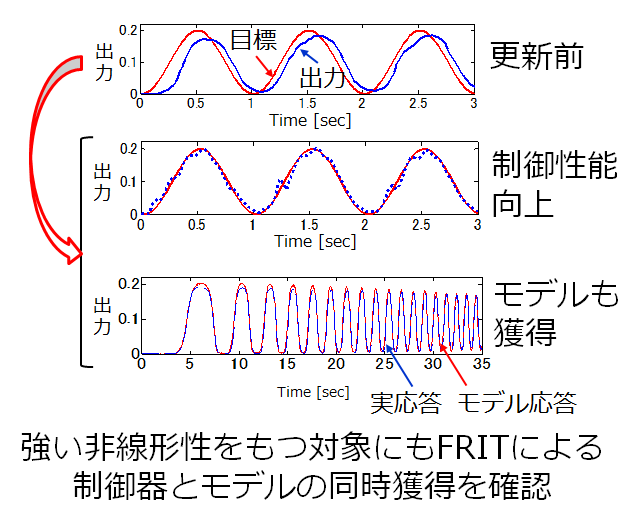
このような制御系では、ヒステリシスが発生し、下記のように入力に対して出力は大きく変化します。
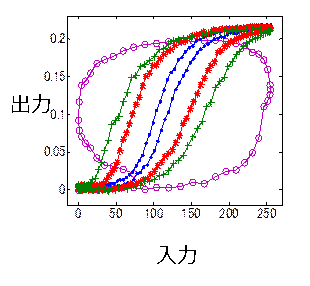
これに対し、オフラインで学習するようにすると、最初は目標信号に対して出力信号がずれていたものが、使うごとに制御性能が向上して目標信号に近似するようになるとともに、どのような入力を行うとどのような出力が発生するかの制御系のモデル化まで実現できるようになります。
人工筋肉はパワーアシストスーツなどで普及が進んでいますが、操作者の動きの個性にチューニングすることが使いやすさを向上する上で重要であり、そのような用途に適しています。
他には下記の用途などに適用事例があります。
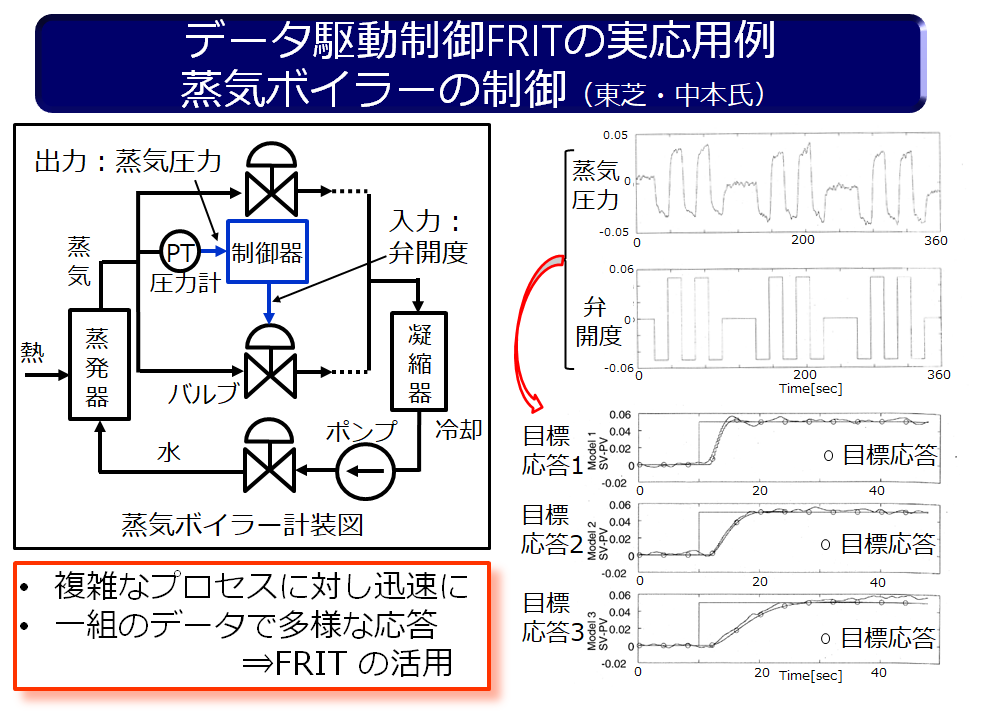
・蒸気ボイラーへの適用事例
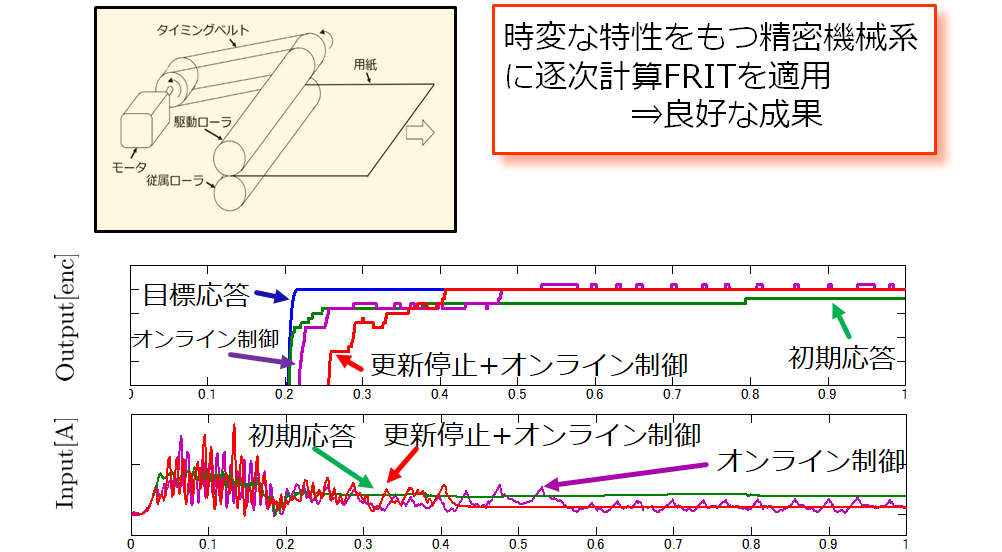
・精密機器への応用事例
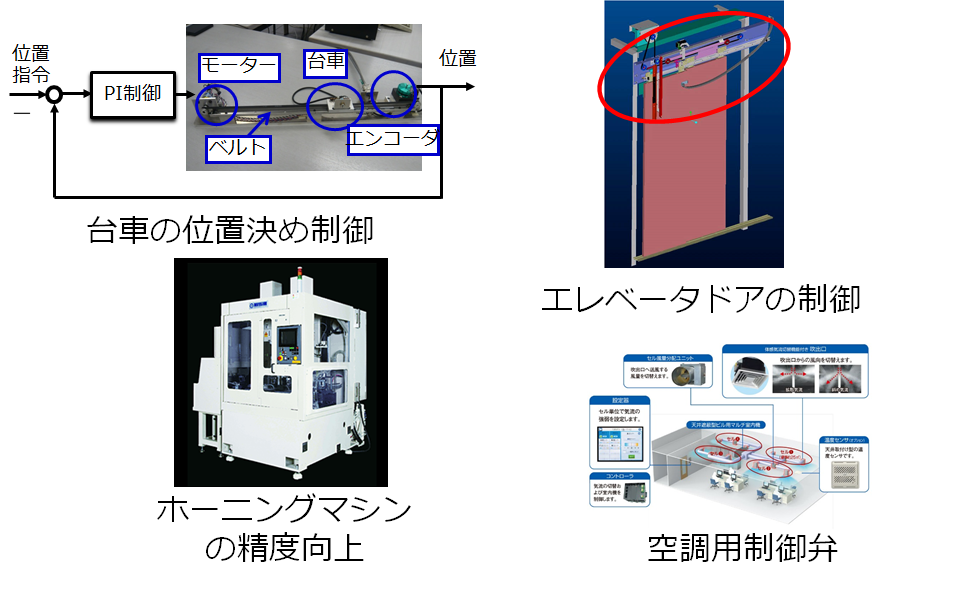
・台車の位置決め、エレベータドア、ホーニングマシン、空調用制御弁への制御事例などがあります。
【技術・ノウハウの活用の流れ】
お問い合わせ後、本技術の詳細についてのご説明をさせていただきます。
お気軽にお問い合わせください。
【専門用語の解説】
【FRIT】
数式的には下記のモデルです。お問合せいただければ分かりやすくご説明いたします。一組のデータでチューニングが可能なことが特徴です。また、オフラインで最適化するため、ガウスニュートン法などの勾配を用いる方法のみならず、GA や粒子群最適化などの多点探索アルゴリズムも適用可能です。
【PID制御】
制御工学におけるフィードバック制御の一種であり、入力値の制御を出力値と目標値との偏差、その積分、および微分の3つの要素によって行う方法です。
制御理論の一分野をなす古典制御論の枠組みで体系化されたもので長い歴史を持っています。フィードバック制御の基礎ともなっており、様々な制御手法が開発・提案され続けている今に至っても、過去の実績や技術者の経験則の蓄積により調整を行いやすいため、産業界では主力の制御手法であると言われています。
【人工筋肉】
人工筋肉は、外部から何らかの制御を受けて形を変形させ、それにより仕事を行う素材の総称です。電場を掛けると収縮・伸張する圧電素子や、イオン濃度差により変形するゲル、光により膨潤・収縮する高分子なども含まれます。
本人工筋肉はゴム内部に空気圧を送ることで収縮・膨張させる機構であり、柔らかく人に安全なゴムを用いることからソフトアクチュエータとも呼ばれています。